CAN通信のアナライザ用基板です.CANコントローラとしてESP32マイコンボードを利用します.
標準のファームウェアでは,受信したCANフレームをUSBを介してUARTで送信するので,PC上のターミナルでモニタできます.
ボード上にCANトランシーバICであるTJA1441(NXP)を実装します.
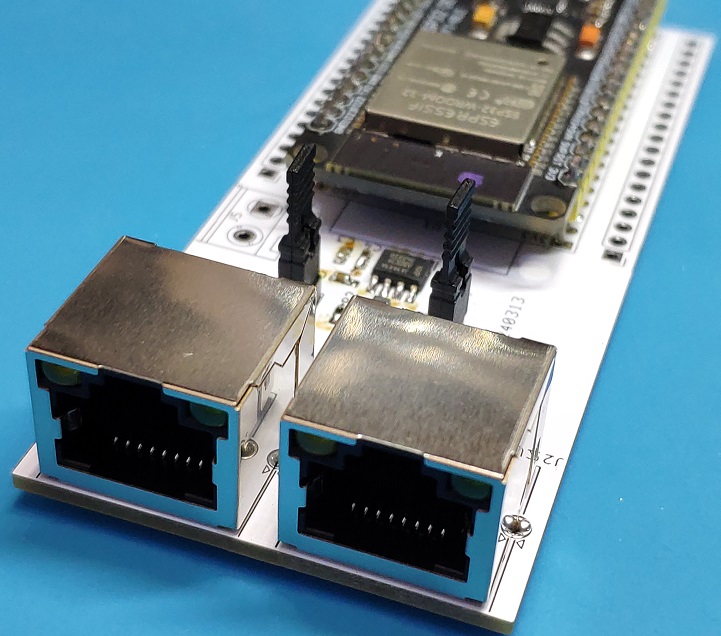
CANバスへのコネクタはRJ45を使用します.2つ搭載できるので,CANノードを数珠つなぎにできます.
リポジトリ:https://github.com/Lathe-Mariel/CAN
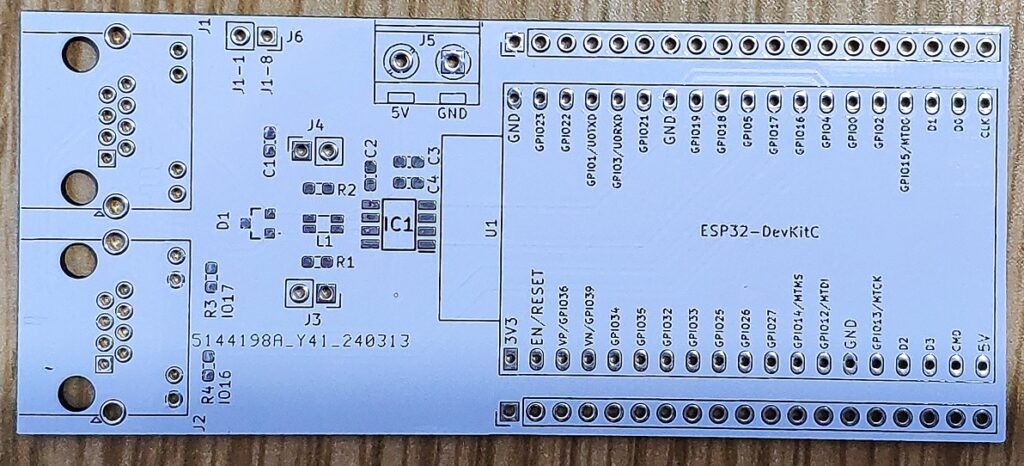
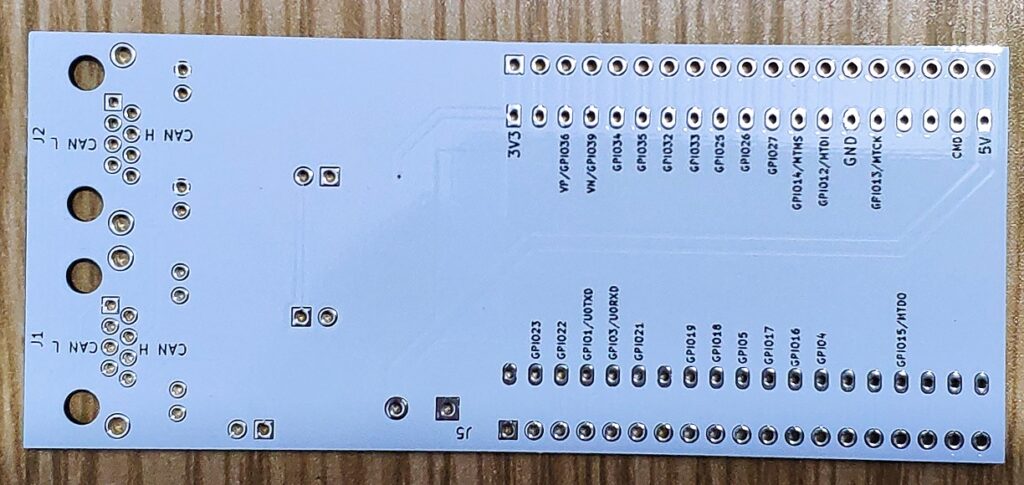
●生基板
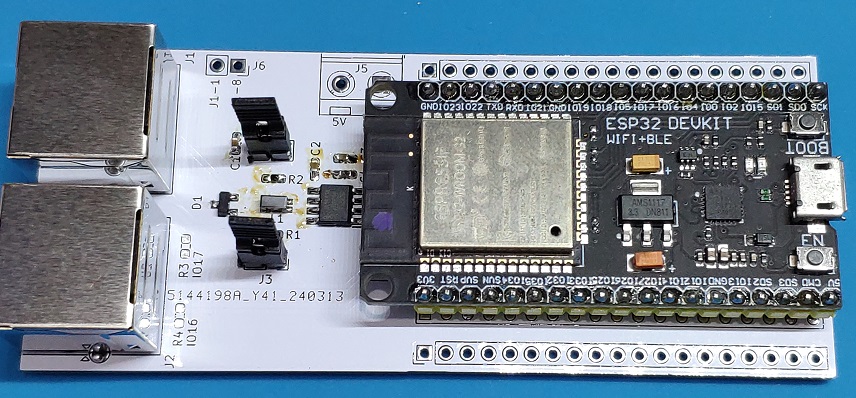
●実装例